[Page 73]
Controllers The controllers for regulating the electric current at the motors to give the necessary torque and number of revolutions must meet two general conditions:—
1st. Where the motor must be reversed and its speed constantly varied during operation, as in the case of a boot crane, an appliance called a controller is used.
2nd. Where the motor runs constantly in the same direction and at a constant speed for long periods of time, but with the possibility of varying the speed when so desired, as in the case of a ventilating fan, a controlling panel is used.
A controller makes the proper electrical connections between the main lines and a motor, so as to control the direction and speed of rotation. They consist of a frame of cast iron with a removable cover of sheet iron. A cylinder supported in bearings in the frame, and operated by a handle. On the cylinder are carried contacts insulated from the shaft and from each other, arranged to make
[Page 79]
the necessary combinations for the control of the motor. Contact fingers on a wooden block supported by the frame. A blow-out magnet and arc-deflector to save the contacts from damage.
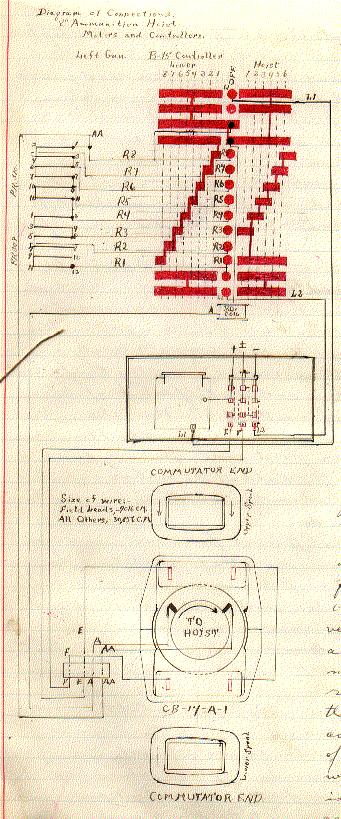
8” Hoist Controller This type of controller — used also for 13” and 6 pdr. amm. Hoists and for boat cranes — gives electrical braking by causing the load to run the motor as a generator by its momentum. When acting as a brake controller for lowering a load or for carrying very light loads, a combination is made, so that the rheostat to which the controller is connected, instead of being in series with the armature, is connected across the line in shunt with the armature. By this arrangement a small amount of current is taken from the line through the rheostat during the time that
[Page 80]
the armature is being operated, besides the current taken or given out by the armature itself. On the first brake position of this controller the rheostat is connected across the line and the armature is in shunt with a very small portion of the rheostat, so that if the load is sufficient to start the motor it will operate as a generator, passing a certain amount of current through the armature and this small portion of the rheostat with which it is in shunt; but if the load does not start the motor, the armature will receive a small amount of current from the line through the rheostat. If the armature does not start in this position, turning the controller cylinder further will connect it in shunt with a greater portion of the rheostat, thus causing it to run faster if the load drives it as a generator, or causing more current to pass through the rheostat in to the armature in case it does not start. As the cylinder is turned still further the armature will be brought up to full speed, no matter whether the load is sufficient to drive it as a generator, or whether it required current from the line to run it as a motor. In this way the speed can be controlled within proper limits, no matter whether it is lifting the load or driven by its load. This does not take place in the case of the ordinary rheostatic controller, in which case more resistance turned into the circuit will cause the armature to run faster when it is driven by its load, and there is no way of reducing its speed below its full load speed.